1.4 Latency in Pitch-to-MIDI Tracking
One of the most critical parameters in pitch-to-MIDI conversion is tracking latency, defined as the time required for a system to detect the fundamental frequency of an incoming signal and translate it into valid MIDI data. This latency is intrinsically linked to the relationship between signal sampling, waveform periodicity, and frequency recognition. Since pitch-detection algorithms must analyze a sufficient portion of a waveform before identifying its pitch, lower frequencies inevitably require longer processing times. In practical terms, the lower the note, the longer the duration of a complete vibrational cycle that must be observed by the converter.
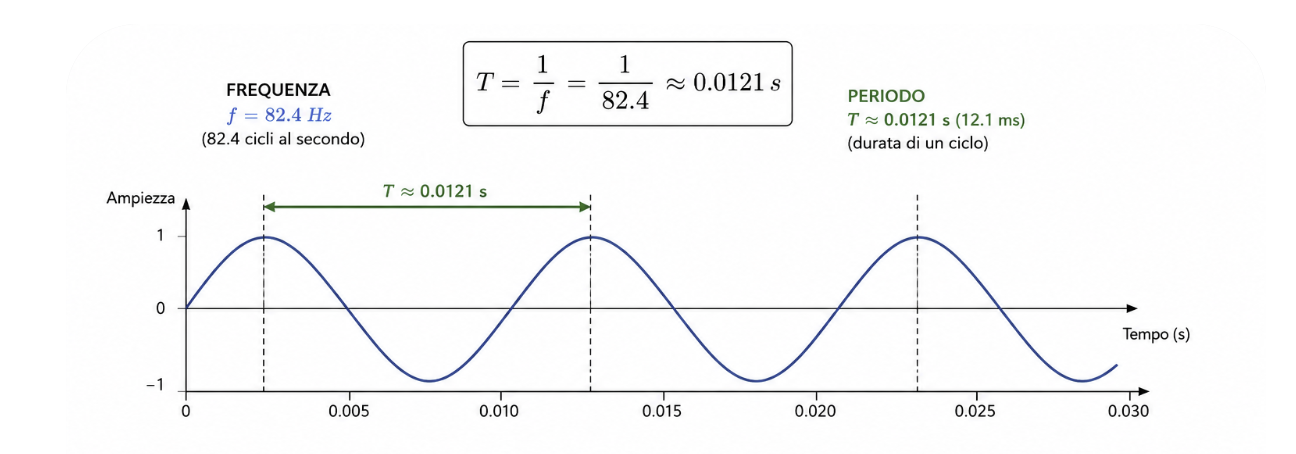
For example, the open sixth string of the guitar (E2, approximately 82 Hz) requires roughly 11–12 ms to complete a single waveform cycle, establishing a fundamental physical constraint for any pitch-recognition system based on frequency analysis.
Latency 6 string
(Hz 82.4)
The relationship between waveform period and pitch-detection time is fundamental: lower-frequency notes require a longer observation window before the fundamental frequency can be identified reliably, thereby contributing directly to tracking latency.
The latency measurements presented here should not be regarded as absolute values, but rather as relative indicators of performance within a specific operational context: real-time performance and algorithmic composition supported by dedicated hardware and software.
All tests were conducted using the same standardized signal chain: a classical guitar strung with nylon strings and equipped with an RMC hexaphonic piezo pickup and an RMC Poly-Drive IV preamplifier, connected via a 13-pin analog interface to the MIDI converter under investigation. MIDI output was transmitted either through a standard DIN connection (in the case of the Axon AX 100) or via USB 2.0 (for the Boss SY-1000 and Roland GM-800), and subsequently routed to a Mac Mini M1 running macOS Sonoma. The software environment consisted of Max/MSP 9.1.4 operating at a sampling rate of 48 kHz, with a buffer size of 128 samples and a signal vector size (SVS) of 64. Parallel recording and temporal verification were performed in Pro Tools, likewise configured with a 128-sample buffer, using RME TotalMix loopback to ensure precise temporal alignment.
Latency was measured through transient-based analysis, calculating the time interval between the physical excitation of the string and the corresponding MIDI event detected within the digital environment.
It is important to emphasize that the measured values are influenced by several variables, including note register, transient clarity, performance dynamics, pickup calibration, the converter’s internal processing strategy, and digital buffer configuration. Consequently, the results should be interpreted as context-dependent and variable-sensitive measurements rather than universal benchmark values.
The following sections present comparative tests of three pitch-to-MIDI conversion systems—the Axon AX 100, Boss SY-1000, and Roland GM-800—evaluated under identical experimental conditions in order to assess their relative tracking latency, temporal stability, and suitability for real-time interaction within algorithmic composition environments.